Join a Workgroup
Work Groups are open to public.
Anyone who wants to connect with and contribute to the Autoware community are welcome to join.
How Autoware Works?
The diagram below summarizes the purpose and interactions of the different working groups within the Autoware Foundation:

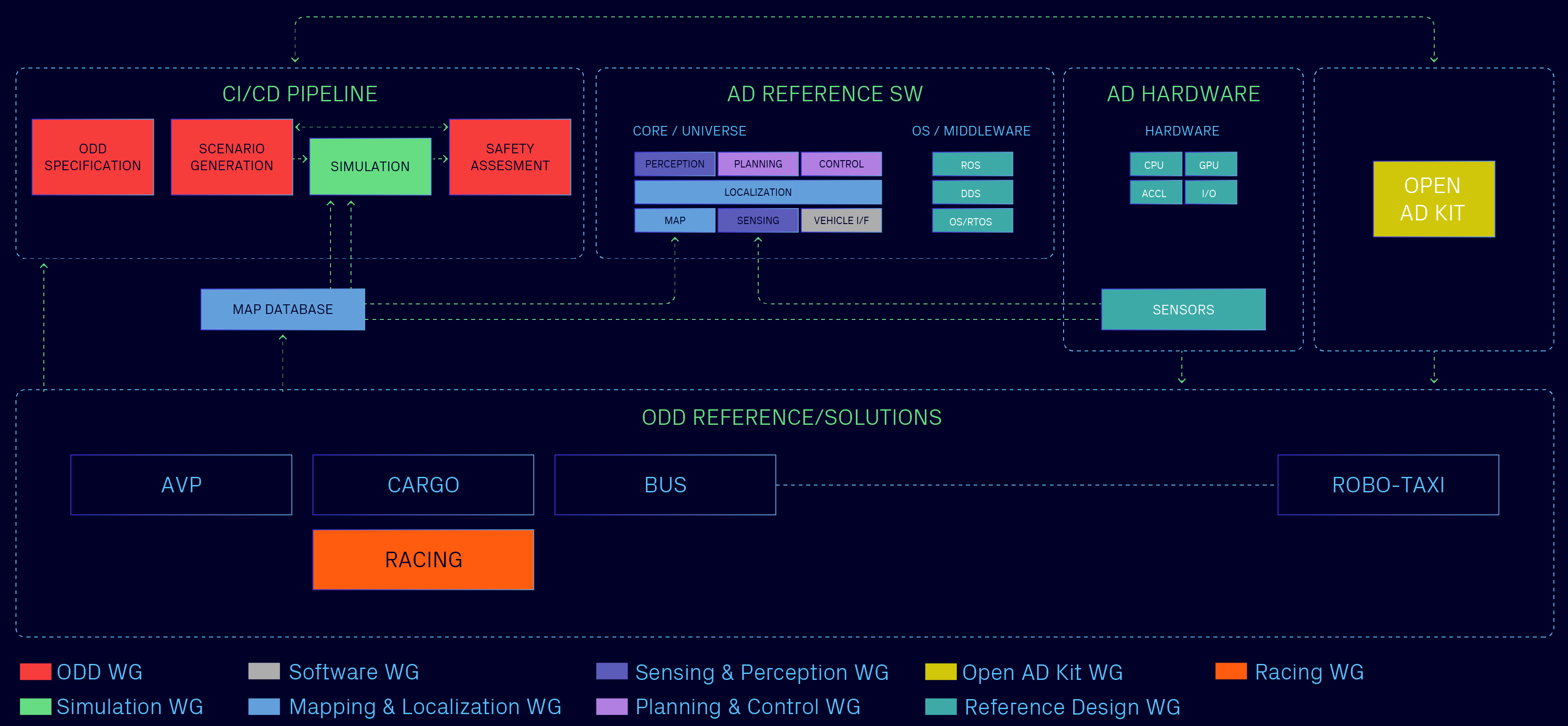{kind=link}
Working Groups
Working groups within Autoware Foundation are technical groups that focus on specific components of Autoware project.
These technical working groups are open to public. To join working groups, simply add it to your calendar. Also you can track working group activities by browsing through respective GitHub Discussions pages.
Currently, the Autoware Foundation has ten working groups. More are in the works.
The cards for specific working groups listed there are arranged by the meeting times. Meaning, the nearest working group meeting card is shown first.
WORKING GROUPS CALENDAROpen AD Kit WG
Docker containerization of Low Speed Autonomy and Privately Owned Vehicle Autonomy, TRL-6 autonomous driving stack
23:00 – 00:00 ⋅ Asia/Tokyo
Truck WG
Responsible for all activities related to design and development of components, systems of autonomous trucking systems in Autoware
17:00 – 18:00 ⋅ Asia/Tokyo
Privately Owned Vehicle WG - Slot 1
Building TRL-6 AD stack using an AI-first approach to perception and planning, targeting highway driving functionality for automotive OEMs and Tier-1 suppliers
10:00 – 11:00 ⋅ Europe/Istanbul
ODD working group weekly meeting
Create a full sensing to planning testing and verification pipeline in Autoware, with scenarios for LSA, PoV and Off Road Autonomy
23:00 – 00:00 ⋅ Asia/Tokyo
Privately Owned Vehicle WG - Slot 2
Building TRL-6 AD stack using an AI-first approach to perception and planning, targeting highway driving functionality for automotive OEMs and Tier-1 suppliers
18:00 – 19:00 ⋅ Europe/Istanbul
Software Working Group
Responsible for Code Maintenance, Library Upgrades, General Software issues, CI pipeline, and developing new APIs
07:00 – 09:00 ⋅ UTC
Simulation WG
Simulation scenario creation for Low Speed Autonomy, Privately Owned Vehicle Autonomy and Off Road Autonomy
14:00 – 15:00 ⋅ Europe/Warsaw
Reference Design WG
Enabling turn-key deployment of OpenAD Kit based, Low Speed Autonomy, Off-road Autonomy, and Privately Owned Vehicle Autonomy Stacks
13:00 – 14:00 ⋅ UTC
Low Speed Autonomy Working Group
Developing TRL-6 AD stack built on Autoware Core and PoV AI stack to enable Low Speed Autonomous driving for use-cases such as warehousing, cargo and logistics
23:00 – 00:00 ⋅ Asia/Tokyo
Off-road WG
Building new technologies to support off-road AD use-cases ranging from agriculture and mining to space exploration with a focus on E2E autonomous driving
08:00 – 09:00 ⋅ America/Los_Angeles
Safety Assurance WG
Developing the safety case to support TRL-6 autonomous driving for Low Speed Autonomy and Privately Owned Vehicles.
23:00 – 00:00 ⋅ Asia/Tokyo